安装
ubuntu 20.04
1 | sudo apt install ros-rolling-desktop |
http://docs.ros.org/en/rolling/Installation/Ubuntu-Install-Debians.html#
ubuntu 20.04
1 | sudo apt install ros-rolling-desktop |
http://docs.ros.org/en/rolling/Installation/Ubuntu-Install-Debians.html#
在探索ROS下一代通信系统的选项时,最初的选择是改进ROS 1的传输,或者使用ZeroMQ、Protocol Buffers和zeroconf(Bonjour/Avahi)等组件库构建一个新的中间件。然而,除了这些选项(这两个选项都涉及到我们从头开始构建一个中间件),ROS项目组还考虑了其他端到端的中间件。在研究中,一个中间件脱颖而出,那就是DDS。
使用端到端中间件(如DDS)的好处是,需要维护的代码要少得多,而且中间件的行为和确切规格已经被提炼成文档。有了这种具体的规范,第三方可以审查、审计和实施具有不同程度的互操作性的中间件。此外,如果要从现有的库中构建一个新的中间件,无论如何都需要创建这种类型的规范。
DDS(数据分发服务)是一套通信协议和API标准,以数据为中心是他的特点,它基于发布-订阅模型进行设计。而FastRTPS是eProsima公司对DDS的一个开源实现。DDS是一套中间件,提供介于操作系统和应用程序之间的功能,提供了低延迟、高可靠的通信以及可扩展的架构。DDS其实分为两部分,一部分是DDS规范,一部份则是DDSI-RTPS协议,是一个互操作性协议,也就是真正实现通讯机制的部分,在ROS2中,也正是这部分,取代了ROS1的TCPROS和UDPROS。
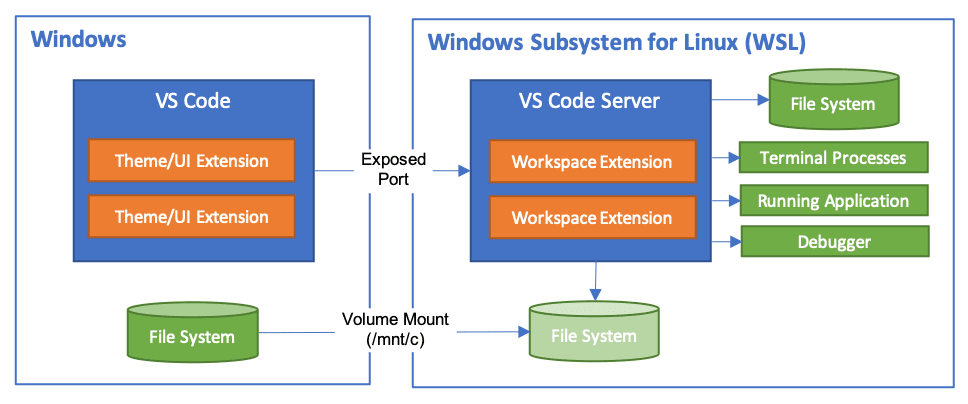
使用vscode + Wsl 可以改善C++/C的开发体验
很久之前写了一个爬虫脚本,每10分钟获取一次比特币价格,当价格波动较大时,使用邮件通知我进行交易。之前的脚本部署在学校的群晖上,由于会时不时地停电,爬虫脚本运行状态很不稳定,这段时间接触了github action ,感觉正好满足我的需求,于是将爬虫迁移到到GitHub Action上,并弃用原来Python实现的邮件发送功能,改为利用Github Action实现邮件通知。
Linux备忘录,记录经常忘记的一些命令以及概念。
众所周知,Freenom是地球上唯一一个提供免费顶级域名的商家,不过需要每年续期,每次续期最多一年,而管理界面并不是很人性化。下面介绍如何注册一个免费的顶级域名,使用github action 自动续费,以及托管于cloudflare。
DDNS(Dynamic Domain Name Server,动态域名服务)是将用户的动态IP地址映射到一个固定的域名解析服务上,用户每次连接网络的时候客户端程序就会通过信息传递把该主机的动态IP地址传送给位于服务商主机上的服务器程序,服务器程序负责提供DNS服务并实现动态域名解析。下面是介绍如何使用脚本实现腾讯云购买域名的DDNS。
之前有拿Wordpress搭建过博客,感觉还是太臃肿了,Hexo这种静态博客刚好满足我的需求,记录下折腾博客的过程。